
W8less Rover and BORG Module Officially Launched
Released as flagship products, the W8less Rover and BORG (Battlefield Operations Robotics Gateway) Module deliver deployable autonomy, decentralized control, and cm-level positioning for GPS-denied, multi-domain missions.

New Multi-Robot Intuitive Interface
Launched a next-gen UI to simplify coordination across heterogeneous robotic teams with minimal operator input.

Testing with the U.S. Army
August: Showcased multi-agent convoy and overwatch behaviors in complex terrain during a joint field exercise in the San Diego mountains.
October: Demonstrated robust pseudo-GPS capabilities in a live environment, at the U.S. Army Futures Command PNTAX, maintaining localization under jamming.
Fully Autonomous RIK Demo at AUVSI
Presented the complete Robotics Intelligence Kernel operating without external comms or GPS at AUVSI XPONENTIAL.
New Jersey Transit Deployment
Deployed AI-driven navigation and positioning tools for rail and bus systems in active transit networks.

ADAS Capabilities for Automotive OEMs
Delivered core autonomy components supporting major OEMs including Ford, GM, Stellantis, and Aptiv.
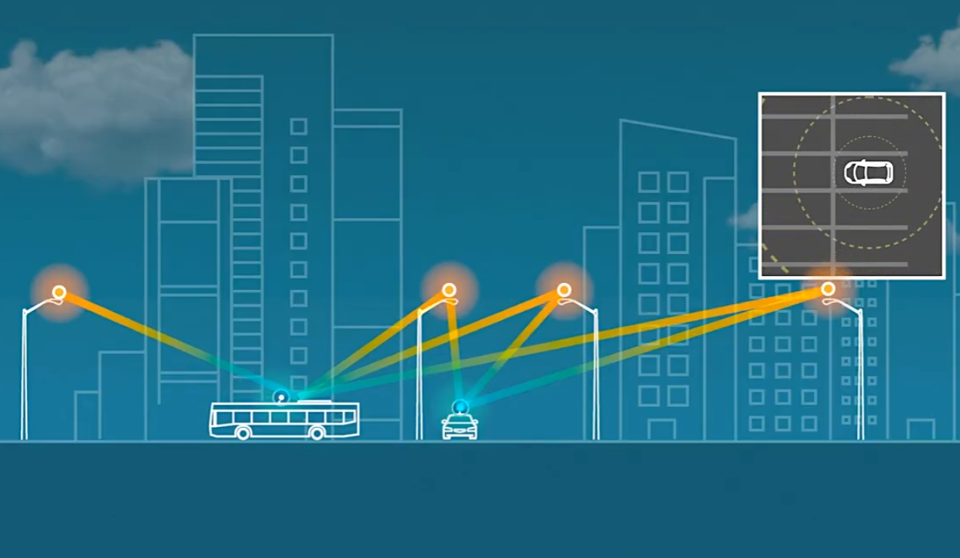
Scalable Micropositioning for NYC Transit
Demonstrated real-time, high-accuracy positioning for public transportation systems in urban environments.

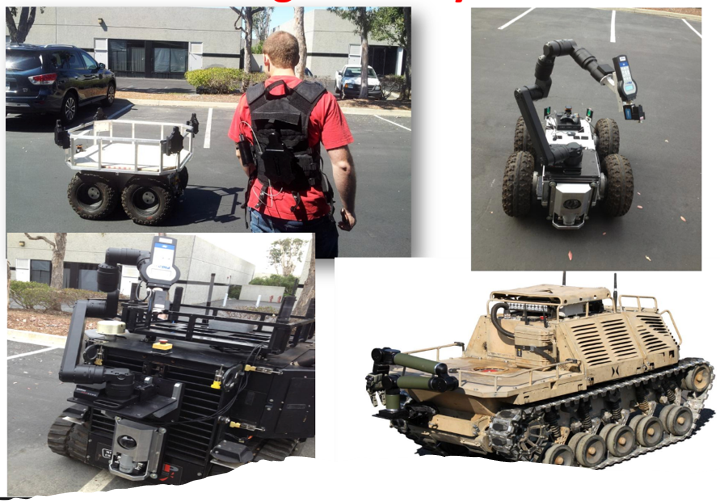
Intelligent Convoys and Assured Positioning, Navigation, and Timing (APNT) for the Military
Enabled GPS-denied convoy operations and developed advanced navigation and EOD capabilities for the U.S. Army and U.S. Navy.
Autonomous Robots for High-Radiation Environments
Developed robotics for the energy sector to safely operate in hazardous, high-radiation zones.

DoD Landmine Robots
Achieved 4× speed improvement and increased probability of detection from 80% to 95% for landmine clearance missions.
1st 100-Robot Swarm for the U.S. Army (DARPA)
Pioneered the first large-scale autonomous robot swarm, laying the foundation for distributed military robotics.

National Science Foundation (NSF) Autonomous Search & Rescue Robots
Early work on autonomous systems supporting disaster response and environmental hazards under NSF-funded efforts.